OS-O(1)调度算法
操作系统-O(1)调度算法
Linux是一个支持多任务的操作系统,而多个任务之间的切换是通过
调度器 来完成,调度器
使用不同的调度算法会有不同的效果。
Linux2.4版本使用的调度算法的时间复杂度为O(n),其主要原理是通过轮询所有可运行任务列表,然后挑选一个最合适的任务运行,所以其时间复杂度与可运行任务队列的长度成正比。
而Linux2.6开始替换成名为
O(1)调度算法,顾名思义,其时间复杂度为O(1)。虽然在后面的版本开始使用
CFS调度算法(完全公平调度算法),但了解
O(1)调度算法
对学习Linux调度器还是有很大帮助的,所以本文主要介绍
O(1)调度算法 的原理与实现。
由于在 Linux 内核中,任务和进程是相同的概念,所以在本文混用了任务和进程这两个名词。
针对每个 CPU,都有两组链表组成两个 hash 表,分别是 active RunQueue 和 expire RunQueue。而每个哈希表中,都通过拉链法维护了 140 个链表,每个槽代表一个优先级,每个链表中的所有任务优先级都相同,因此,调度器可以以 O(1) 时间时间复杂度获取到优先级最高的进程,而为了进一步提升这一过程的执行效率,调度器还通过一个 bitmap 来存储 active 队列各个优先级是否存在任务。
为什么哈希表要拥有 140 个槽呢?因为他们对应了 0~139 这 140 个进程优先级。在 O(1) 调度器中,进程优先级数字越低,实际优先级越高,而 0~99 为实时进程优先级,100~139 为非实时进程优先级。
O(1)调度器执行过程
当 active 队列中某一个进程完成执行,它就会被移动到队列尾部;当队列全部任务都执行过指定时间片以后,bitmap 该优先级对应的位就会被置为 0,当整个 bitmap 全部被置 0 后,调度器指向 active 队列和 expired 队列的指针就会交换,并且重新对已执行过的进程进行优先级重估,并且添加到全新的 active 队列中,开启新的一轮执行。
O(1)调度器的缺点
- IO 密集型任务的识别准确率欠佳,尤其是与 O(n) 简单粗暴的实现方式相比,并且随着时间的推移,这类问题暴露的也越来越多,直到到了积重难返的地步;
- avtive 队列和 expire 队列交换的过程虽然简单快捷,但重新评估优先级仍然存在一定的耗时。
O(1)调度算法原理
prio_array 结构
O(1)调度算法
通过优先级来对任务进行分组,可分为140个优先级(0 ~
139,数值越小优先级越高),每个优先级的任务由一个队列来维护。prio_array
结构就是用来维护这些任务队列,如下代码:
1 | |
下面介绍 prio_array 结构各个字段的作用:
nr_active: 所有优先级队列中的总任务数。bitmap: 位图,每个位对应一个优先级的任务队列,用于记录哪个任务队列不为空,能通过bitmap够快速找到不为空的任务队列。queue: 优先级队列数组,每个元素维护一个优先级队列,比如索引为0的元素维护着优先级为0的任务队列。
下图更直观地展示了 prio_array 结构各个字段的关系:
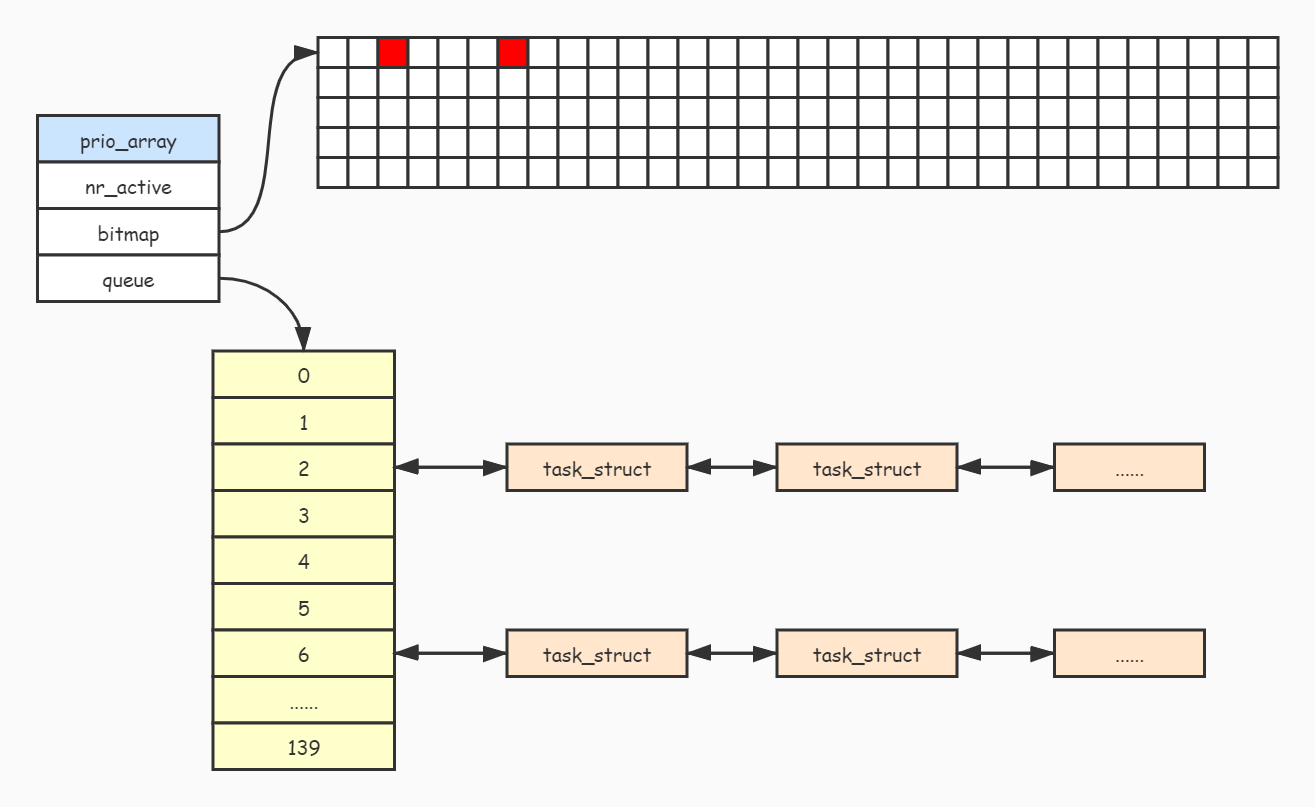
如上图所述,bitmap
的第2位和第6位为1(红色代表为1,白色代表为0),表示优先级为2和6的任务队列不为空,也就是说
queue 数组的第2个元素和第6个元素的队列不为空。
runqueue 结构
另外,为了减少多核CPU之间的竞争,所以每个CPU都需要维护一份本地的优先队列。因为如果使用全局的优先队列,那么多核CPU就需要对全局优先队列进行上锁,从而导致性能下降。
每个CPU都需要维护一个 runqueue
结构,runqueue
结构主要维护任务调度相关的信息,比如优先队列、调度次数、CPU负载信息等。其定义如下:
1 | |
runqueue 结构有两个重要的字段:active 和
expired,这两个字段在 O(1)调度算法
中起着至关重要的作用。我们先来了解一下 O(1)调度算法
的大概原理。
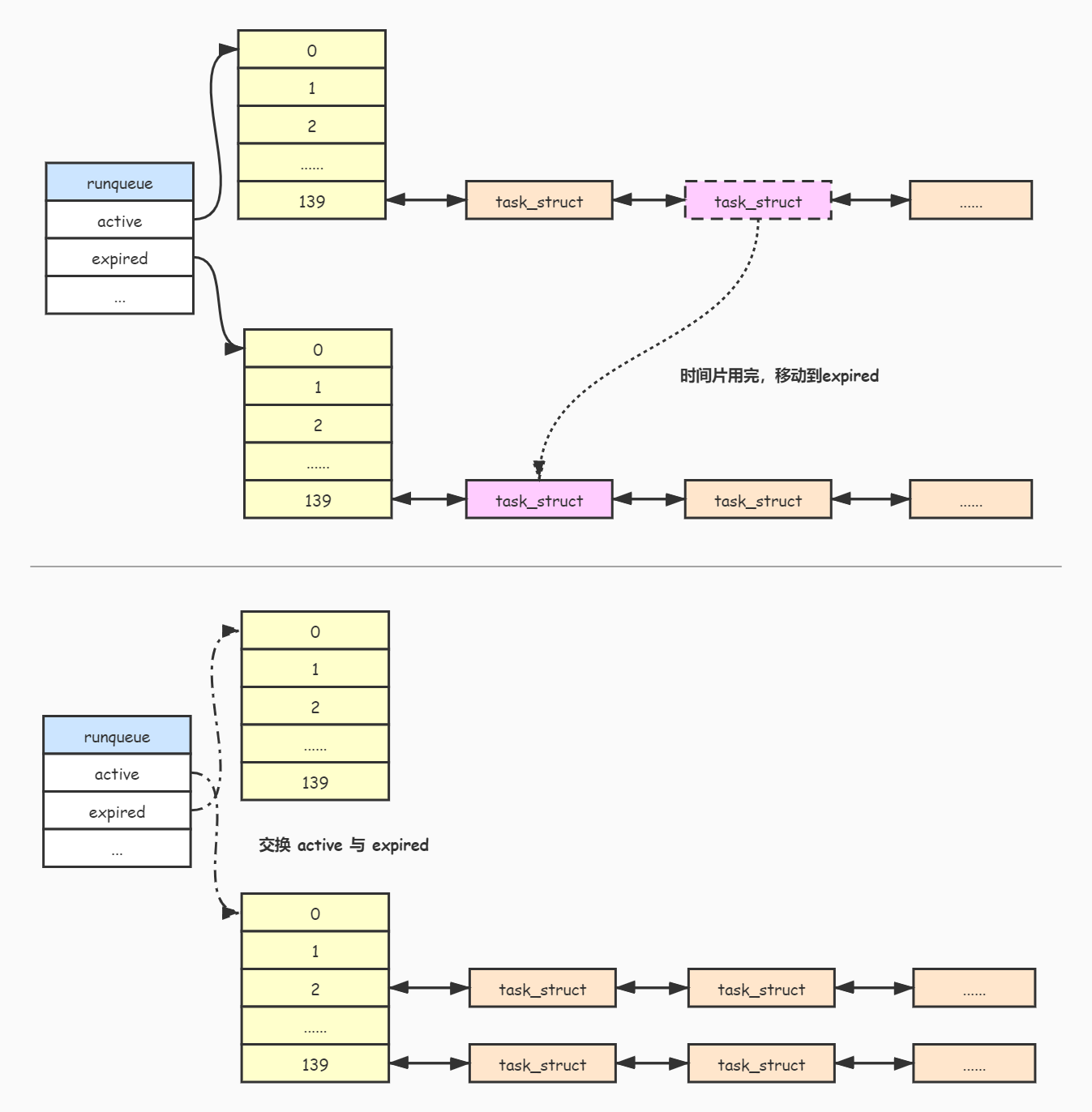
我们注意到 active 和 expired 字段的类型为
prio_array,指向任务优先队列。active
代表可以调度的任务队列,而 expired
字段代表时间片已经用完的任务队列。active 和
expired 会进行以下两个过程:
- 当
active中的任务时间片用完,那么就会被移动到expired中。 - 当
active中已经没有任务可以运行,就把expired与active交换,从而expired中的任务可以重新被调度。
如下图所示:
O(1)调度算法 把140个优先级的前100个(0 ~ 99)作为
实时进程优先级,而后40个(100 ~ 139)作为
普通进程优先级。实时进程被放置到实时进程优先级的队列中,而普通进程放置到普通进程优先级的队列中。
实时进程调度
实时进程分为 FIFO(先进先出) 和
RR(时间轮询) 两种,其调度算法比较简单,如下:
先进先出的实时进程调度:如果调度器在执行某个先进先出的实时进程,那么调度器会一直运行这个进程,直至其主动放弃运行权(退出进程或者sleep等)。时间轮询的实时进程调度:如果调度器在执行某个时间轮询的实时进程,那么调度器会判断当前进程的时间片是否用完,如果用完的话,那么重新分配时间片给它,并且重新放置回active队列中,然后调度到其他同优先级或者优先级更高的实时进程进行运行。
普通进程调度
每个进程都要一个动态优先级和静态优先级,静态优先级不会变化(进程创建时被设置),而动态优先级会随着进程的睡眠时间而发生变化。动态优先级可以通过以下公式进行计算:
1 | |
上面公式的 bonus(奖励或惩罚)
是通过进程的睡眠时间计算出来,进程的睡眠时间越大,bonus
的值就越大,那么动态优先级就越高(前面说过优先级的值越小,优先级越高)。
另外要说明一下,实时进程的动态优先级与静态优先级相同。
当一个普通进程被添加到运行队列时,会先计算其动态优先级,然后按照动态优先级的值来添加到对应优先级的队列中。而调度器调度进程时,会先选择优先级最高的任务队列中的进程进行调度运行。
运行时间片计算
当进程的时间用完后,就需要重新进行计算。进程的运行时间片与静态优先级有关,可以通过以下公式进行计算:
1 | |
O(1)调度算法实现
接下来我们分析一下 O(1)调度算法 在内核中的实现。
时钟中断
时钟中断是由硬件触发的,可以通过编程来设置其频率,Linux内核一般设置为每秒产生100
~ 1000次。时钟中断会触发调用 scheduler_tick()
内核函数,其主要工作是:减少进程的可运行时间片,如果时间片用完,那么把进程从
active 队列移动到 expired
队列中。代码如下:
1 | |
上面代码主要完成以下几个工作:
- 减少进程的时间片,并且判断时间片是否已经使用完。
- 如果时间片使用完,那么把进程从
active队列中删除。 - 调用
set_tsk_need_resched()函数设TIF_NEED_RESCHED标志,表示当前进程需要重新调度。 - 调用
effective_prio()函数重新计算进程的动态优先级。 - 调用
task_timeslice()函数重新计算进程的可运行时间片。 - 如果当前进程是交互进程并且没有处于饥饿状态,那么重新加入到
active队列。 - 否则把进程移动到
expired队列。
任务调度
如果进程设置了 TIF_NEED_RESCHED
标志,那么当从时钟中断返回到用户空间时,会调用 schedule()
函数进行任务调度。schedule() 函数代码如下:
1 | |
上面代码主要完成以下几个步骤:
- 如果当前
runqueue的active队列为空,那么把active队列与expired队列进行交换。 - 调用
sched_find_first_bit()函数在bitmap中找到优先级最高并且不为空的任务队列索引。 - 调用
context_switch()函数切换到next进程进行运行。